I’m currently running only a raspberry Pi 4 on the site with some modifications. This is while I’m in neurology residency and in a new place.
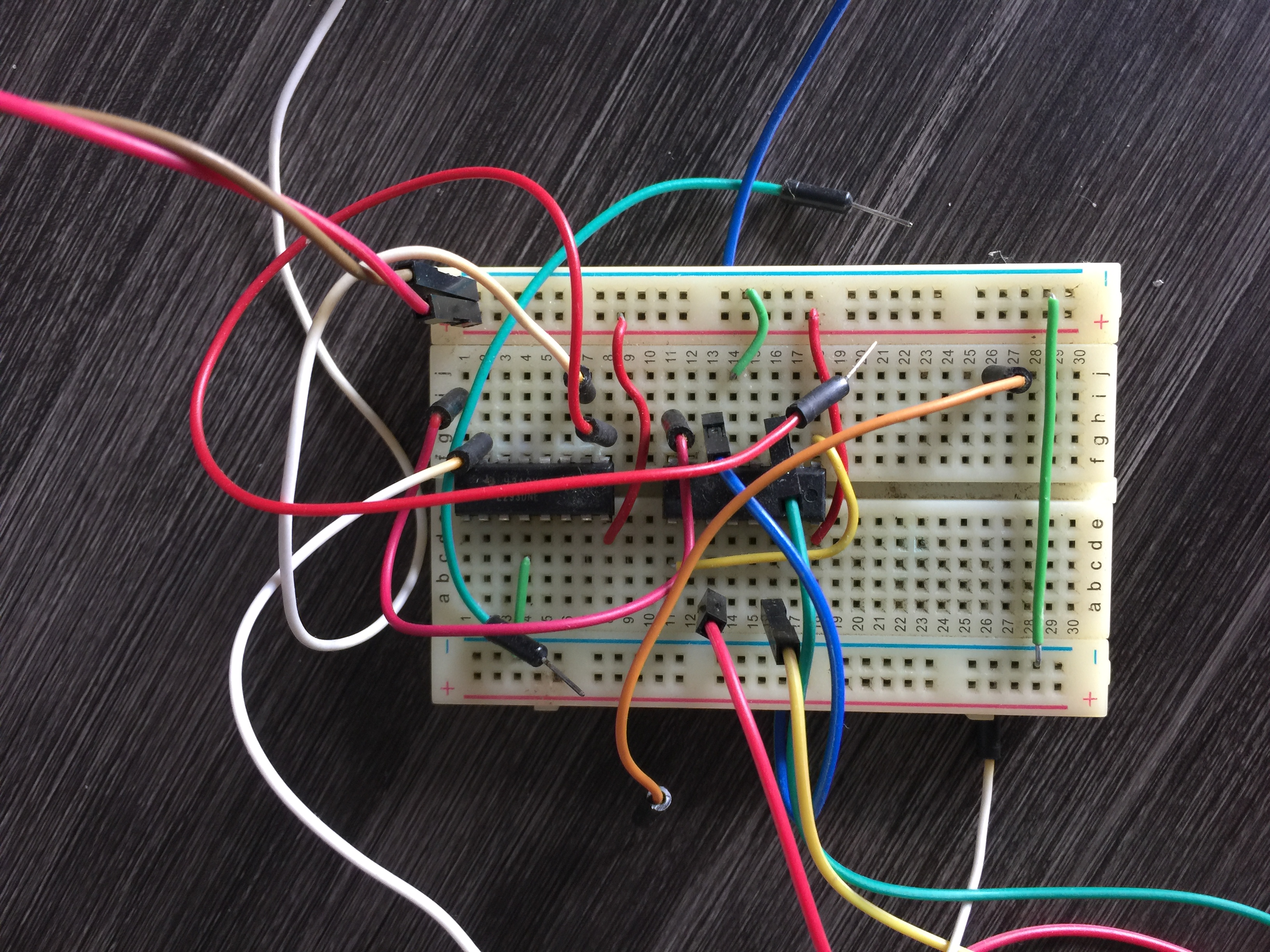
Initially there were two raspberry Pi used for the current setup. The BMP085 and AM2302 from Adafruit.com make the bulk of the sensors. RTC to keep accurate time and a Iogear wifi dongle and another antenna wifi dongle. To control the water pump I have used a L293D chip to power 12V motor.
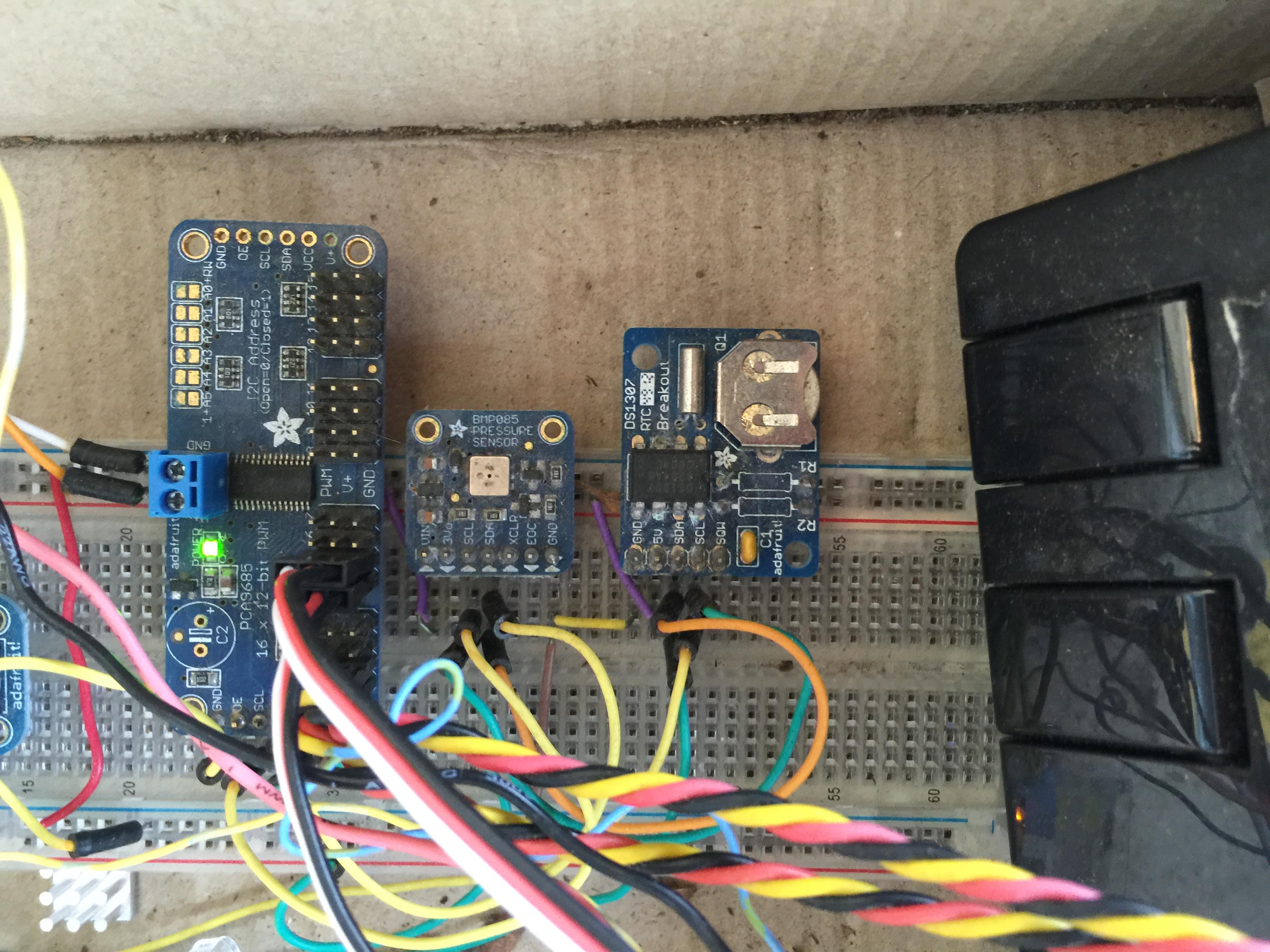
 Control of the servos is done by one Raspberry Pi. On a breadboard, we have a real-time clock (RTC), servo controller (16 channel from Adafruit), a BMP085, a AM2302 and a chip to control the pump motor (for watering plants-not on image).
Control of the servos is done by one Raspberry Pi. On a breadboard, we have a real-time clock (RTC), servo controller (16 channel from Adafruit), a BMP085, a AM2302 and a chip to control the pump motor (for watering plants-not on image).

A closer look at the sensors and controllers, it is mostly from Adafruit.com. The data is read from sensors every 5 minutes to create the “Current Conditions” graph. Another process keeps a database of the conditions over time and that’s used to make the plots. As mentioned before this is all done using Python and many libraries from Adafruit.com
This Raspberry Pi has been replaced by a model 2 recently. It has 3 cameras connected and can’t really handle anything else. It has a NoIR camera and two Logitech webcams.

The pan and tilt setup and servo are from servocity.com. The cameras are from logitech and another is a NOIR. Another fixed camera points directly at a Serissa (Thousand flowers) bonsai tree. The NOIR camera point up to the middle space between bonsai trees. A pan and tilt was added in November 2015 to the NOIR camera.
I recently added in June 2017 a Motor HAT to the Raspberry Pi from Adafruit. It will let me control the NEMA-17 stepper motor and let me add some DC motors later on. It is definitely better than using many GPIO pins and two L293D chips.