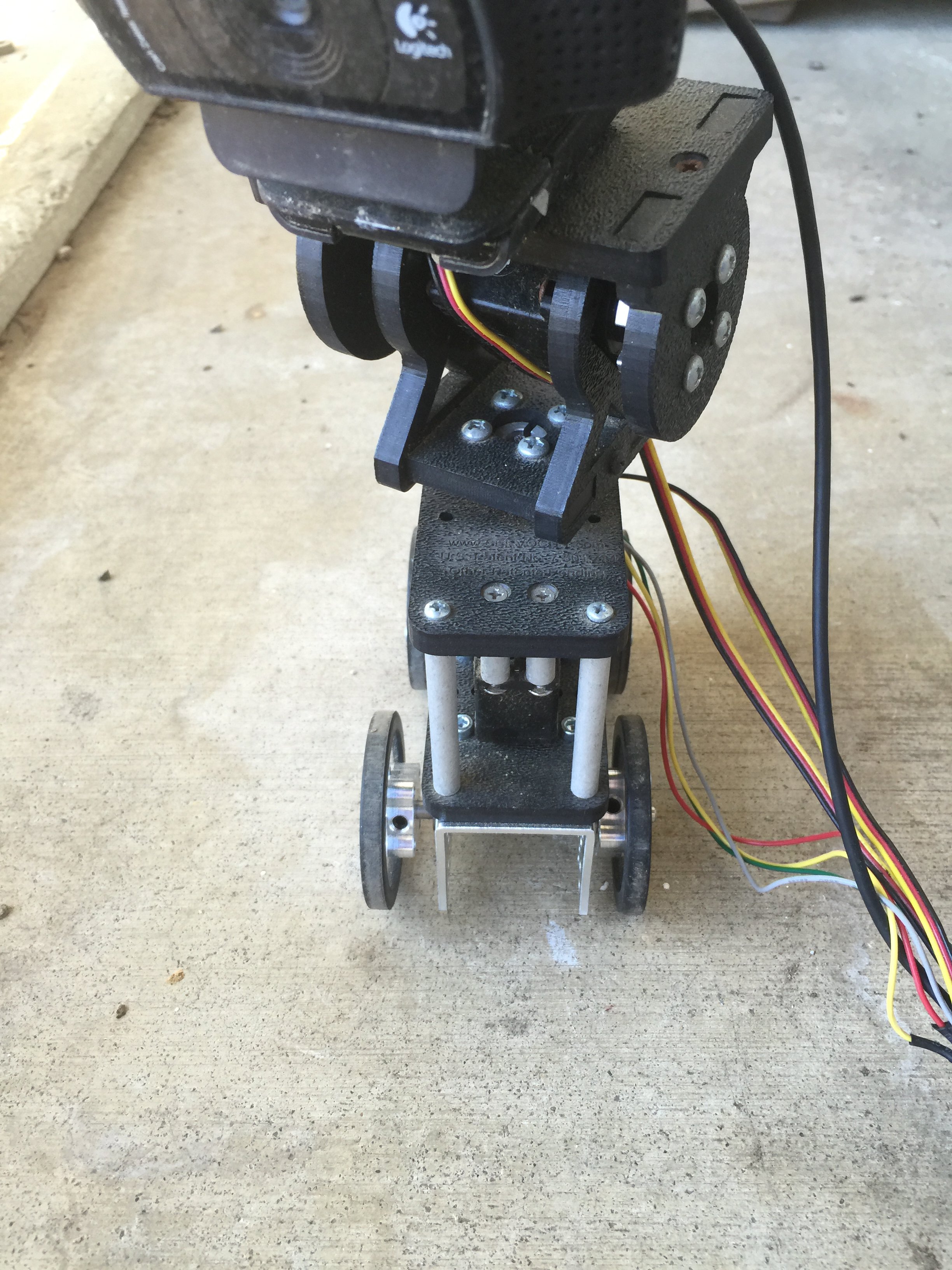
I ended up adding an Adafruit M otor HAT to the raspberry pi controlling the position of the camera pan and tilt. That way I can use one of the two controls for the NEMA-17 I bought some time ago. I was planning on using this as a proper raspberry pi HAT but this works well enough until I find a better method that uses less resources. Well this is much simpler than old way I was doing that used too many GPIO pins. The old method of using two L293D used too many GPIO pins. This Motor HAT is i2c so I have a lot of GPIO pins left in this raspberry pi as it is. The spare motor control will be used for controlling the water pump. I still need a way to open/close some valves easily.
otor HAT to the raspberry pi controlling the position of the camera pan and tilt. That way I can use one of the two controls for the NEMA-17 I bought some time ago. I was planning on using this as a proper raspberry pi HAT but this works well enough until I find a better method that uses less resources. Well this is much simpler than old way I was doing that used too many GPIO pins. The old method of using two L293D used too many GPIO pins. This Motor HAT is i2c so I have a lot of GPIO pins left in this raspberry pi as it is. The spare motor control will be used for controlling the water pump. I still need a way to open/close some valves easily.