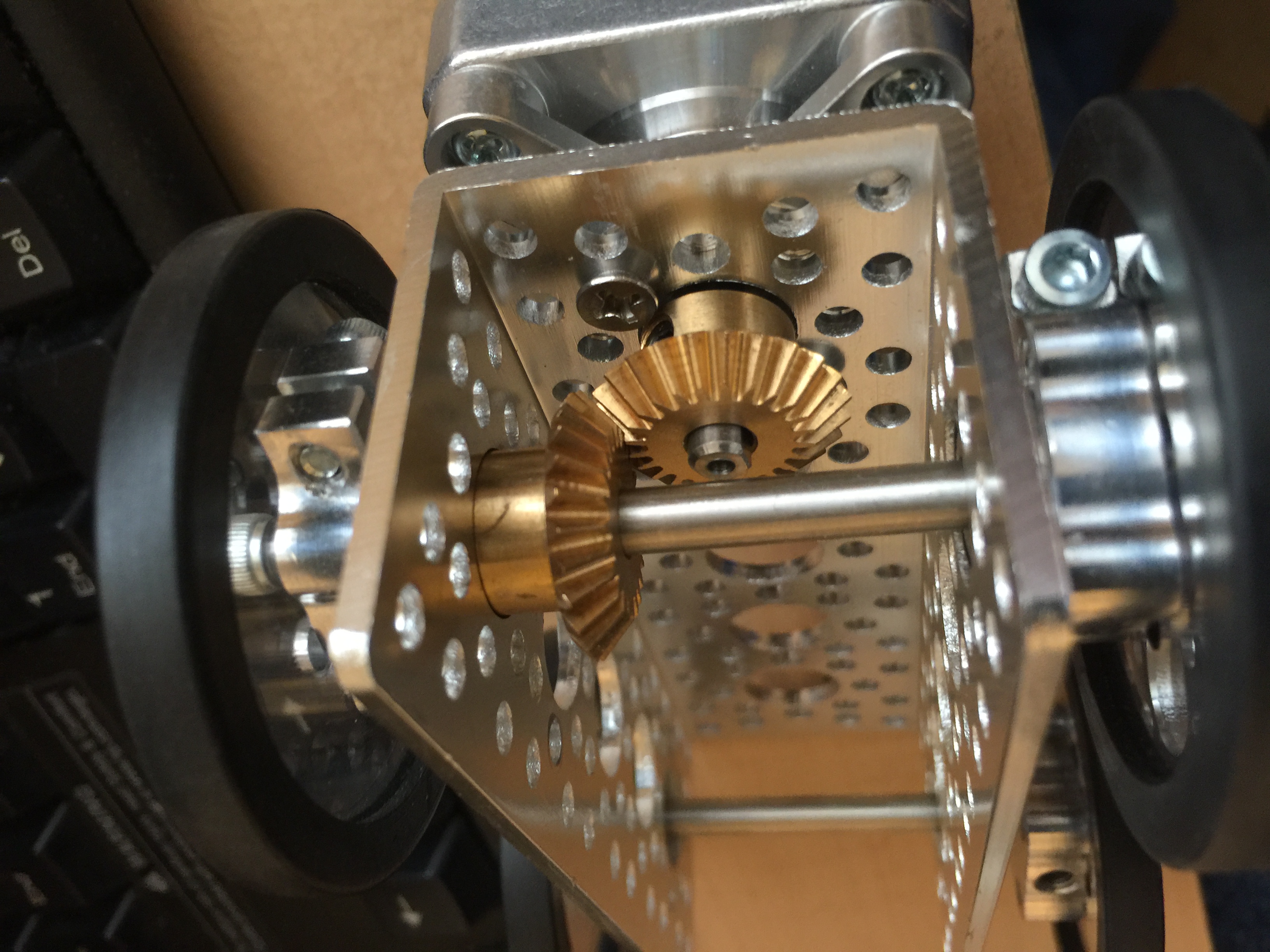
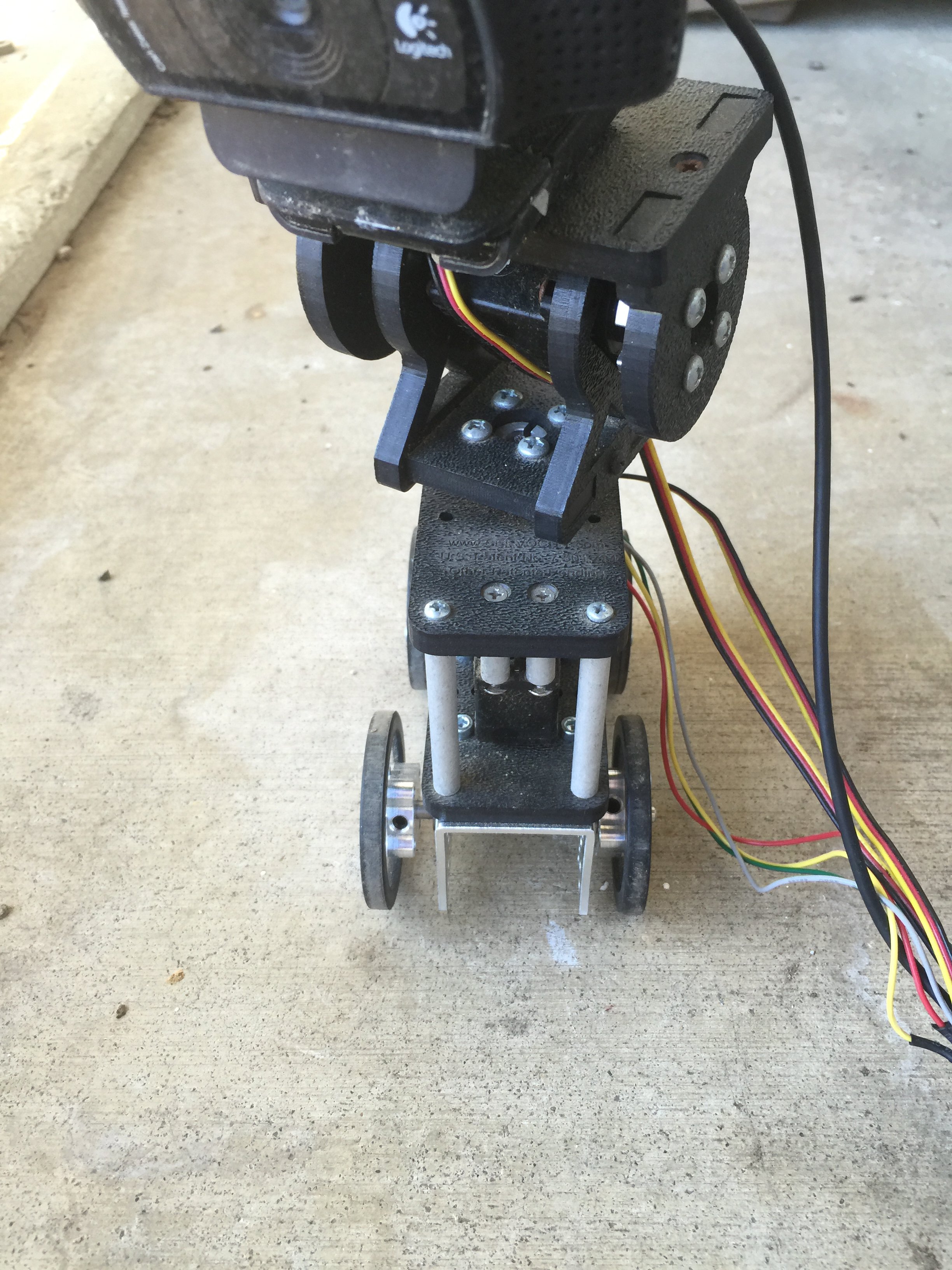
Well, camera 1 is now on wheels. Control through the web will be added later, right now is only through the command prompt. The wheels are on a Actobotics frame bought from Servocity. I am also using a stepper motor, that way I can keep count of how many steps I move ‘forward’ or ‘backwards’. All of this is of course controlled by the Raspberry Pi using Python code and a couple of L293D chips.
I am also using a stepper motor, that way I can keep count of how many steps I move ‘forward’ or ‘backwards’. All of this is of course controlled by the Raspberry Pi using Python code and a couple of L293D chips.

Another recent addition is control of two valves for watering bonsai or the other plants like strawberries and beans. I am also using L293D chip to control these valves and the pump (12V). These valves seem to have been taken from coffee machines. Nice and robust but also 12V. I am finally using all those pins on the newer Raspberry Pi 2. There are of course HATs that you can buy that could simplify the setup.